
000919(01)DevonRover.jpg
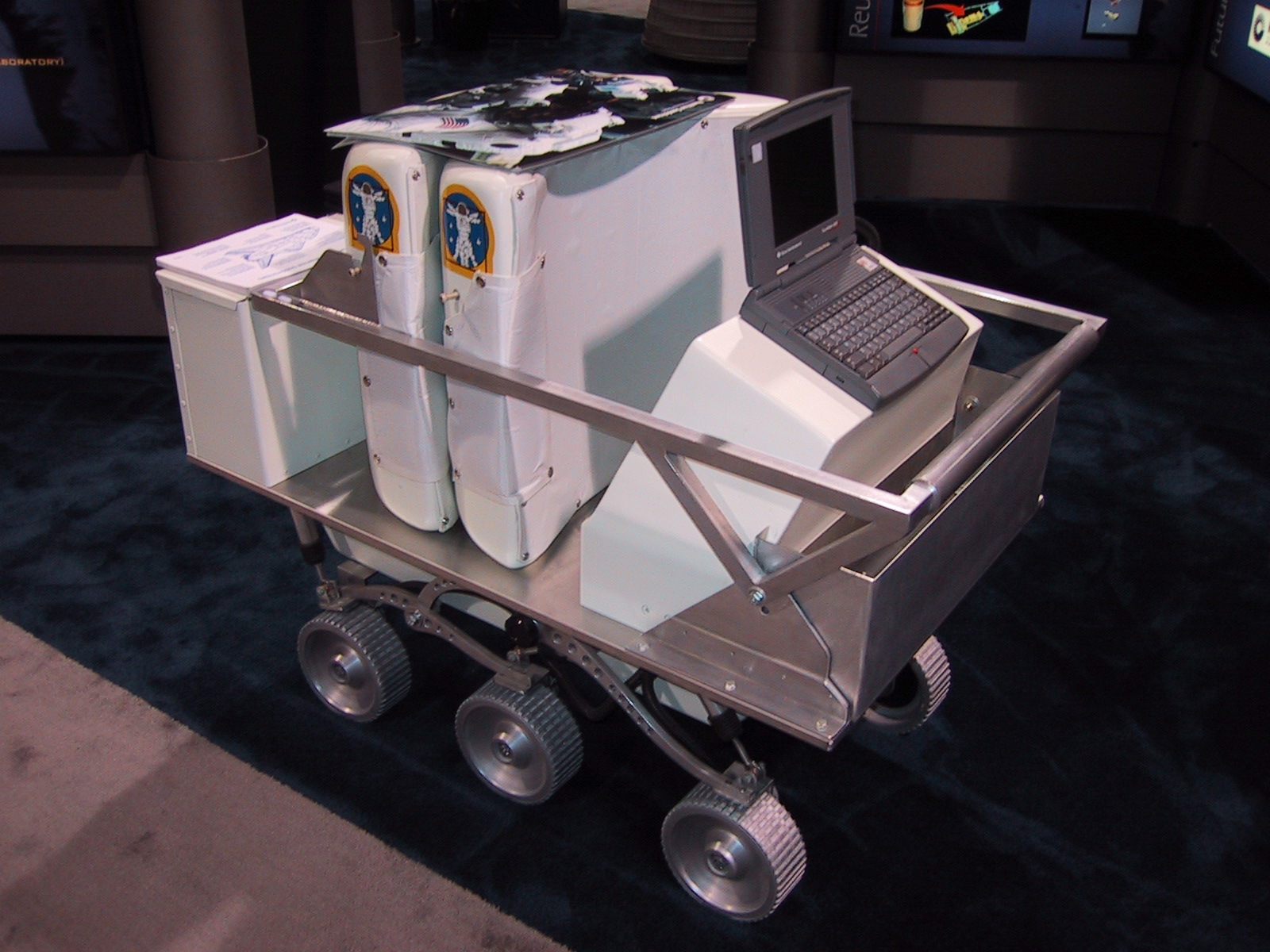
This is a rover developed by Hamilton Sundstrand as an astronaut assistance
rover. Note that it's carrying two "life support systems" for
their Devon Island suit simulator, with the supposition that an astronaut
in the field would change out a backpack to extend surface time.
000919(02)DevonRover.jpg
The laptop in front is presumably controlling the vehicle. I didn't take
any closeups of it, and I don't remember examining it closely, so I don't
know how it was hooked in . I'm suspicious of the lack of visible wires,
though. Also note no signs of external sensors (cameras, etc.)
000919(03)DevonRover.jpg
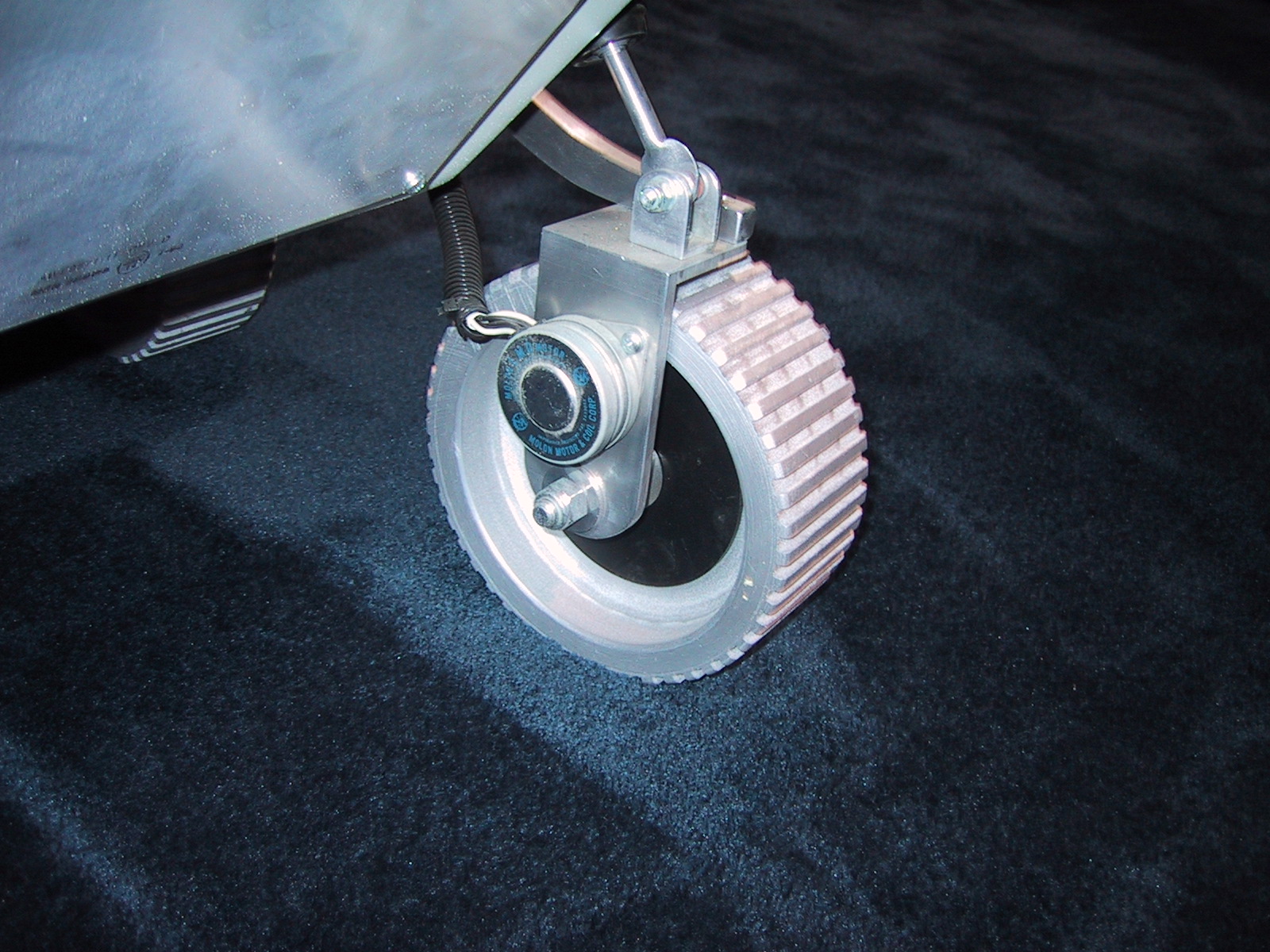
Here's a wheel system. The small round thing on the support is the drive
motor. Note that there's no steering actuator - this vehicle clearly uses
skid-slip steering.
000919(04)DevonRover.jpg
These are very small wheels, so perrformance over obstacles would be extremely
limited. I also question whether or not this vehicle really has the torque
to keep up with an astronaut - based on motor size and wheel size (and wire
size in the preceeding picture), it's extremely doubtful!

000919(05)DevonRover.jpg
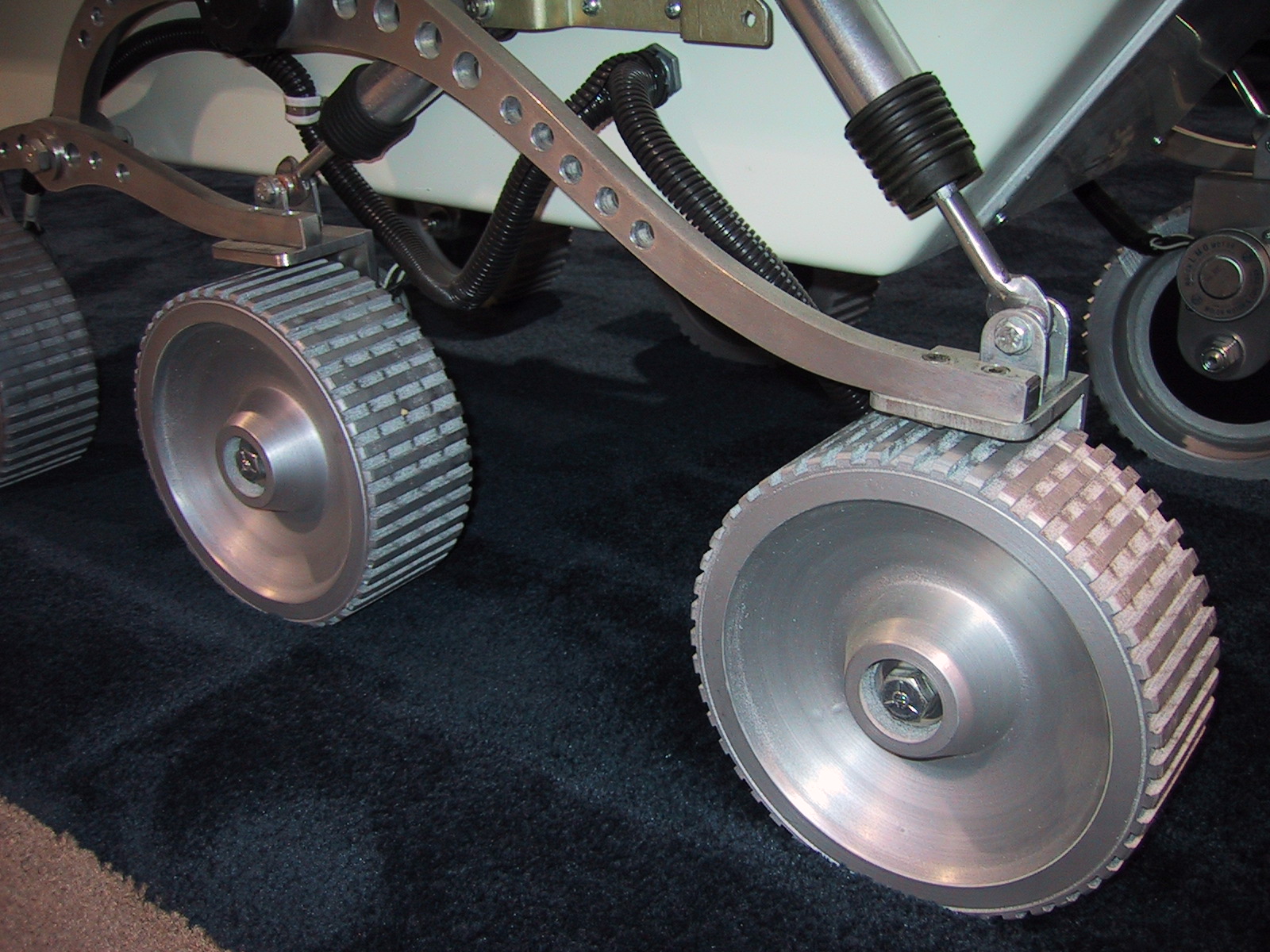
The next two pictures are the suspension, which is (at first glance, anyway)
the "classic"r ocker-bogey developed at JPL and used on Pathfinder.
The interesting thing is the shock attached at the fore and aft wheels,
which constrains the articulation that makes the rocker bogey work. The
body presumably houses batteries.

000919(06)DevonRover.jpg
The challenge in using rocker bogeys is to allow the interwheel articulation,
but there has to be some supplemental linkage to suspend the vehicle and
keep the body ~level as the wheels respond to obstacles. The shock struts
are an easy way to do that, but it keeps the suspension from transferring
weight between wheels to allow full obstacle clearance.

000919(07)DevonRover.jpg
Another wide-angle shot from the right rear. The rectangular box is presumably
a place for the astronauts to store tools, samples, etc.
000920(01)DevonRover.jpg
This is the latch holding the utility box closed. Not very interesting,
but it isn't what I would choose for an EVA interface

000920(02)DevonRover.jpg
View from the left rear. The backpacks sit on the flat floor and have a
pin that keep them from falling over. I think this would be insufficient
if you were going over rocks, up and down grades, etc.